MEMS research — tapered Z-shape design
Bi-Directional Electrothermal Microactuator
Year
2024–2025
Institution
UC Berkeley · ME 219
Tech & tools
- PolyMUMPs
- ANSYS Thermal
- MATLAB
- Polysilicon
- Microfabrication
A thermo-force-driven, bi-directional electrothermal actuator with tapered Z-shaped beams, designed and simulated for fabrication via the PolyMUMPs (Polysilicon Multi-User MEMS Process) three-layer surface-micromachining flow. The research introduced a tapering optimization to improve vertical shuttle displacement; electrothermal simulations were conducted in ANSYS and validated through analytical structural calculations in MATLAB.
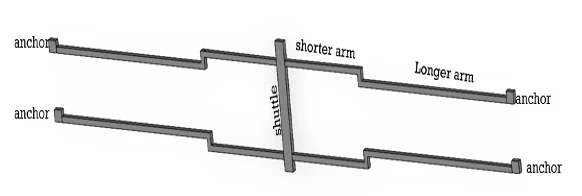
Design approach. The actuator uses Z-shaped actuation beams clamped between bonding-pad anchors that also act as electrical contacts. When current passes through the beams, Joule heating drives thermal expansion. The Z-geometry converts in-plane expansion into vertical mechanical motion of a rigid shuttle. Unlike traditional V-shape actuators, the Z-shape avoids buckling failure modes and supports bi-directional operation.
Key dimensions:
- Anchors: 20 × 20 μm
- Shuttle: 200 × 30 μm
- Longer beam arm: 400 × 10 μm
- Short arm: 200 × 10 μm
- Z-shape transition region: 30 × 10 μm
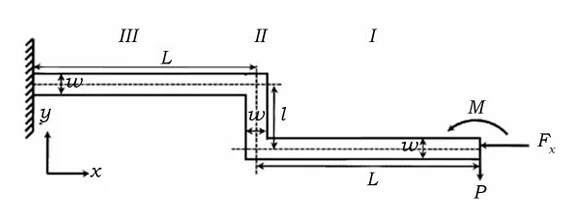
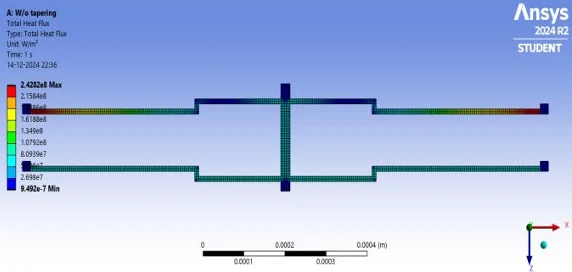
Tapering innovation. Beams were tapered from anchors toward the shuttle to improve thermal distribution and heat flux. Four tapered-width cases were studied: 10 μm, 9 μm, 8 μm, and 7 μm. Gradual tapering ensures more uniform temperature distribution across the beam, raising the effective expansion and resulting shuttle displacement.
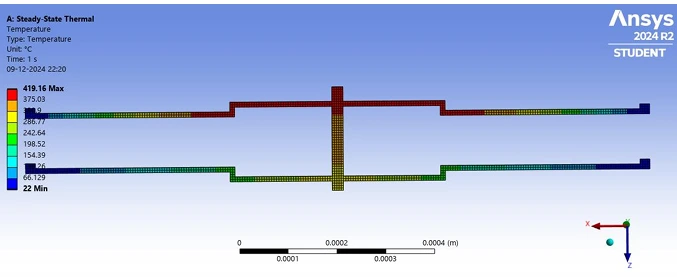
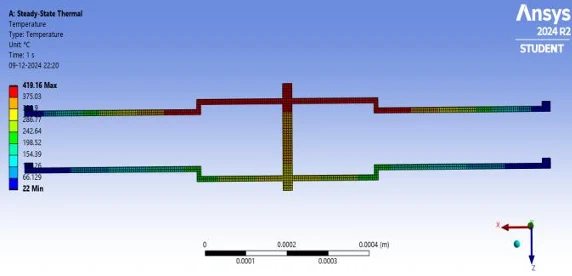
Simulation methodology. Electrothermal simulations were carried out using ANSYS Steady-State Thermal with:
- Internal heat generation from upper beams driven by ~10 mA current
- Convective boundary conditions on surfaces exposed to air
- Anchors maintained at room temperature
- Steady-state initial conditions
Material properties (polysilicon):
- Thermal conductivity: 34 W/m·K
- Specific heat: 678 J/kg·K
- Density: 2320 kg/m³
- Thermal expansion coefficient: 2.6 × 10⁻⁶ /K
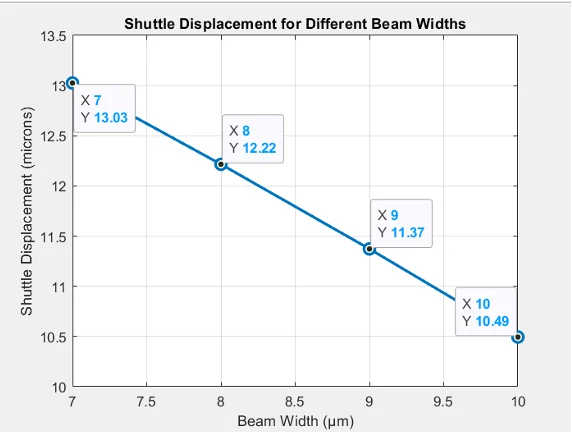
Performance results. Across the four tapered cases, vertical shuttle displacement scaled with tapering:
- 10 μm width: 10.49 μm displacement
- 9 μm width: 11.37 μm displacement
- 8 μm width: 12.22 μm displacement
- 7 μm width: 13.03 μm displacement
Compared to equivalent V-shape micro actuators, the untapered Z-shape already delivered ~50% better displacement; gradual tapering further improved thermal distribution, heat flux, and effective shuttle travel.
Fabrication. Designed for the PolyMUMPs three-layer polysilicon surface-micromachining flow:
- Substrate preparation on a 1 mm silicon wafer
- 2 μm polysilicon deposited via CVD
- Photolithography to define the Z-shape beam pattern
- Polysilicon etch to form beams
- Sacrificial layer deposition (support during fab)
- Sacrificial-layer etch to release suspended beams + shuttle
- Metal deposition for anchor electrical contacts
- Final etch to allow free beam motion
Fabrication challenges include maintaining precise tapered-beam dimensions, ensuring proper release of the suspended structures, preventing stiction during release, and creating reliable electrical connections at the anchors.
Applications. Bi-directional motion opens applications across precision positioning for optical components, micromanipulation tools for biomedical use, RF MEMS switches with improved reliability, and micro-robotics / autonomous microsystems.